
CARVALHO Daniel
- FLUL, UNIARQ, FCT, LAQU, Lisbon, Portugal
- Computational archaeology, Contemporary archaeology, Europe, Theoretical archaeology
- recommender
Recommendations: 4
Reviews: 0
Recommendations: 4
Using Text Mining to Search for Neolithic Vlaardingen Culture Sites in the Rhine-Meuse-Scheldt Delta
Excavating archaeological knowledge with Text Mining, NER and BERT
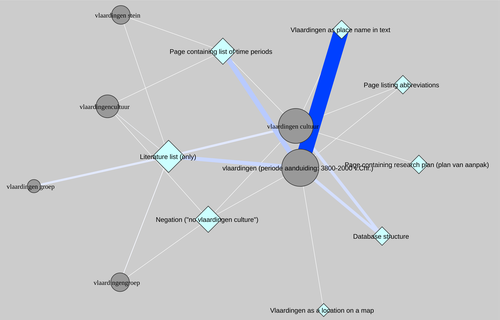
Recommended by Daniel Carvalho based on reviews by Simon Carrignon and 1 anonymous reviewerThe production of texts in archaeology is vast and multiple in nature, and the archaeologist often misses the true extent of its scope. Machine learning and deep learning have a top place to play in these analyses (Bellat et al 2025), with text extraction methods being therefore a useful tool for reducing complexity and, more specifically, for uncovering elements that may be lost in the midst of so much literary production. This is what Van den Dikkenberg and Brandsen set out to do in the specific case of Vlaardingen Culture (3400-2500 BCE). By using NER (Named Entity Recognition) with BERT (Bidirectional Encoder Representations from Transformers) they were able to recover data related to the location of sites, the relevance of the data and, just as importantly, potential errors and failures in interpretation (Van den Dikkenberg and Brandsen 2025). The contextual aspect is emphasized here by the authors, and is one of the main reasons why BERT is used, which is logically a wake-up call for the future: it is not enough to classify or represent data, it is essential to understand what surrounds it, its contexts and its particularities (Brandsen et al 2022).
For this, refinement is always advocated, as these models need constant attention in terms of both training data and parameters. This constant search means that this article is not simply an analysis, but that it can be a relevant contribution both to the culture in question and to the way in which we approach and extract relevant information about the grey literature that archaeology produces. Thus, Van den Dikkenberg and Brandsen present us with an article that is eminently practical but which considers the theoretical implications of this automation of the search for the contexts of archaeological data, which reinforces its relevance and, consequently, its recommendation.
References
Bellat, M., Orellana Figueroa, J. D., Reeves, J. S., Taghizadeh-Mehrjardi, R., Tennie, C. & Scholten, T. (2025). Machine learning applications in archaeological practices: A review. https://doi.org/10.48550/arXiv.2501.03840
Brandsen, A., Verberne, S., Lambers, K. & Wansleeben, M. (2022). Can BERT dig it? Named entity recognition for information retrieval in the archaeology domain. Journal on Computing and Cultural Heritage, 15(3), 1–18. https://doi.org/10.1145/3497842
Van den Dikkenberg, L. & Brandsen, A. (2025). Using Text Mining to Search for Neolithic Vlaardingen Culture Sites in the Rhine-Meuse-Scheldt Delta. Zenodo. v2 peer-reviewed and recommended by Peer Community In Archaeology https://doi.org/10.5281/zenodo.14763691

Exploiting RFID Technology and Robotics in the Museum
Social Robotics in the Museum: a case for human-robot interaction using RFID Technology
Recommended by Daniel Carvalho based on reviews by Dominik Hagmann, Sebastian Hageneuer and Alexis PantosThe paper “Exploiting RFID Technology and Robotics in the Museum” (Dimitriou et al 2023) is a relevant contribution to museology and an interface between the public, archaeological discourse and the field of social robotics. It deals well with these themes and is concise in its approach, with a strong visual component that helps the reader to understand what is at stake.
The option of demonstrating the different steps that lead to the final construction of the robot is appropriate, so that it is understood that it really is a linked process and not simple tasks that have no connection. The use of RFID technology for topological movement of social robots has been continuously developed (e.g., Corrales and Salichs 2009; Turcu and Turcu 2012; Sequeira and Gameiro 2017) and shown to have advantages for these environments. Especially in the context of a museum, with all the necessary precautions to avoid breaching the public's privacy, RFID labels are a viable, low-cost solution, as the authors point out (Dimitriou et al 2023), and, above all, one that does not require the identification of users. It is in itself part of an ambitious project, since the robot performs several functions and not just one, a development compared to other currents within social robotics (see Hellou et al 2022: 1770 for a description of the tasks given to robots in museums). The robotic system itself also makes effective use of the localization system, both physically, by RFID labels and by knowing how to situate itself with the public visiting the museum, adapting to their needs, which is essential for it to be successful (see Gasteiger, Hellou and Ahn 2022: 690 for the theme of localization). Archaeology can provide a threshold of approaches when it comes to social robotics and this project demonstrates that, bringing together elements of interaction, education and mobility in a single method. Hence, this is a paper with great merit and deserves to be recommended as it allows us to think of the museum as a space where humans and non-humans can converge to create intelligible discourses, whether in the historical, archaeological or cultural spheres.
References
Dimitriou, A. G., Papadopoulou, S., Dermenoudi, M., Moneda, A., Drakaki, V., Malama, A., Filotheou, A., Raptopoulos Chatzistefanou, A., Tzitzis, A., Megalou, S., Siachalou, S., Bletsas, A., Yioultsis, T., Velentza, A. M., Pliasa, S., Fachantidis, N., Tsagkaraki, E., Karolidis, D., Tsoungaris, C., Balafa, P. and Koukouvou, A. (2024). Exploiting RFID Technology and Robotics in the Museum. Zenodo, 7805387, ver. 3 peer-reviewed and recommended by Peer Community in Archaeology. https://doi.org/10.5281/zenodo.7805387
Corrales, A. and Salichs, M.A. (2009). Integration of a RFID System in a Social Robot. In: Kim, JH., et al. Progress in Robotics. FIRA 2009. Communications in Computer and Information Science, vol 44. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-642-03986-7_8
Gasteiger, N., Hellou, M. and Ahn, H.S. (2023). Factors for Personalization and Localization to Optimize Human–Robot Interaction: A Literature Review. Int J of Soc Robotics 15, 689–701. https://doi.org/10.1007/s12369-021-00811-8
Hellou, M., Lim, J., Gasteiger, N., Jang, M. and Ahn, H. (2022). Technical Methods for Social Robots in Museum Settings: An Overview of the Literature. Int J of Soc Robotics 14, 1767–1786 (2022). https://doi.org/10.1007/s12369-022-00904-y
Sequeira, J. S., and Gameiro, D. (2017). A Probabilistic Approach to RFID-Based Localization for Human-Robot Interaction in Social Robotics. Electronics, 6(2), 32. MDPI AG. http://dx.doi.org/10.3390/electronics6020032
Turcu, C. and Turcu, C. (2012). The Social Internet of Things and the RFID-based robots. In: IV International Congress on Ultra Modern Telecommunications and Control Systems, St. Petersburg, Russia, 2012, pp. 77-83. https://doi.org/10.1109/ICUMT.2012.6459769
Visual encoding of a 3D virtual reconstruction's scientific justification: feedback from a proof-of-concept research
3D Models, Knowledge and Visualization: a prototype for 3D virtual models according to plausible criteria
Recommended by Daniel Carvalho based on reviews by Robert Bischoff and Louise TharandtThe construction of 3D realities is deeply embedded in archaeological practices. From sites to artifacts, archaeology has dedicated itself to creating digital copies for the most varied purposes. The paper “Visual encoding of a 3D virtual reconstruction's 3 scientific justification: feedback from a proof-of-concept research” (Jean-Yves et al 2024) represents an advance, in the sense that it does not just deal with a three-dimensional theory for archaeological practice, but rather offers proposals regarding the epistemic component, how it is possible to represent knowledge through the workflow of 3D virtual reconstructions themselves. The authors aim to unite three main axes - knowledge modeling, visual encoding and 3D content reuse - (Jean-Yves et al 2024: 2), which, for all intents and purposes, form the basis of this article. With regard to the first aspect, this work questions how it is possible to transmit the knowledge we want to a 3D model and how we can optimize this epistemic component. A methodology based on plausibility criteria is offered, which, for the archaeological field, offers relevant space for reflection. Given our inability to fully understand the object or site that is the subject of the 3D representation, whether in space or time, building a method based on probabilistic categories is probably one of the most realistic approaches to the realities of the past.
Thus, establishing a plausibility criterion allows the user to question the knowledge that is transmitted through the representation, and can corroborate or refute it in future situations. This is because the role of reusing these models is of great interest to the authors, a perfectly justifiable sentiment, as it encourages a critical view of scientific practices. Visual encoding is, in terms of its conjunction with knowledge practices, a key element. The notion of simplicity under Maeda's (2006) design principles not only represents a way of thinking that favors operability, but also a user-friendly design in the prototype that the authors have created. This is also visible when it comes to the reuse of parts of the models, in a chronological logic: adapting the models based on architectural elements that can be removed or molded is a testament to intelligent design, whereby instead of redoing models in their entirety, they are partially used for other purposes.
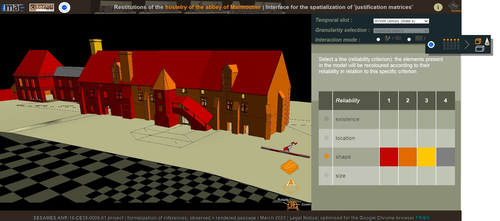
All these factors come together in the final prototype, a web application that combines relational databases (RDBMS) with a data mapper (MassiveJS), using the PHP programming language. The example used is the Marmoutier Abbey hostelry, a centuries-old building which, according to the sources presented, has evolved architecturally over several centuries ((Jean-Yves et al 2024: 8). These states of the building are represented visually through architectural elements based on their existence, location, shape and size, always in terms of what is presented as being plausible. This allows not only the creation of a matrix in which various categories are related to various architectural elements, but also a visual aid, through a chromatic spectrum, of the plausibility that the authors are aiming for.
In short, this is an article that seeks to rethink the degree of knowledge we can obtain through 3D visualizations and that does not take models as static, but rather realities that must be explored, recycled and reinterpreted in the light of different data, users and future research. For this reason, it is a work of great relevance to theoretical advances in 3D modeling adapted to archaeology.
References
Blaise, J.-Y., Dudek, I., Bergerot, L. and Gaël, S. (2024). Visual encoding of a 3D virtual reconstruction's scientific justification: feedback from a proof-of-concept research, Zenodo, 7983163, ver. 3 peer-reviewed and recommended by Peer Community in Archaeology. https://doi.org/10.5281/zenodo.10496540
John Maeda. (2006). The Laws of Simplicity. MIT Press, Cambridge, MA, USA.
Advancing data quality of marine archaeological documentation using underwater robotics: from simulation environments to real-world scenarios
Beyond Deep Blue: Underwater robotics, simulations and archaeology
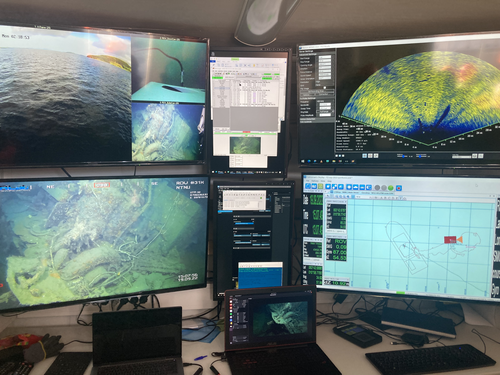
Recommended by Daniel Carvalho based on reviews by Marco Moderato and 1 anonymous reviewerDiamanti et al. (2024) is a significant contribution to the field of underwater robotics and their use in archaeology, with an innovative approach to some major problems in the deployment of said technologies. It identifies issues when it comes to approaching Underwater Cultural Heritage (UCH) sites and does so through an interest in the combination of data, maneuverability, and the interpretation provided by the instruments that archaeologists operate. The article's motives are clear: it is not enough to find the means to reach these sites, but rather is fundamental to take a step forward in methodology and how we can safeguard certain aspects of data recovery with robust mission planning.
To this end, the article does not fail to highlight previous contributions, in an intertwined web of references that demonstrate the marked evolution of the use of Unmanned Underwater Vehicles (UUVs), Remote Operated Vehicles (ROVs), Autonomous Underwater Vehicles (AUVs) and Autonomous Surface Vehicles (ASVs), which are growing exponentially in use (see Kapetanović et al. 2020). It should be emphasized that the notion of ‘aquatic environment’ used here is quite broad and is not limited to oceanic or maritime environments, which allows for a larger perspective on distinct technologies that proliferate in underwater archaeology. There is also a relevant discussion on the typologies of sensors and how these autonomous vehicles obtain their data, where are debated Inertial Measurement Units (IMU) and LiDAR systems.
Thus, the authors of this article propose the creation of a model that acquires data through simulations, which allows for a better understanding of what a real mission presupposes in the field. Their tripartite method - pre-mission planning; mission plan and post-mission plan - offers a performing algorithm that simplifies and provides reliability to all the parts of the intervention. The use of real cases to create simulation models allows for a substantial approximation to common practice in underwater environments. And yet, the article is at its most innovative status when it combines all the elements it sets out to explore. It could simply focus on the methodological or planning component, on obtaining data, or on theoretical problems. But it goes further, which makes this approach more complete and of interest to the archaeological community. By not taking any part as isolated, the problems and possible solutions arising from the course of the mission are carried over from one parameter to another, where details are worked upon and efficiency goals are set.
One of the most significant cases is the tuning of ocean optics in aquatic environments according to the idiosyncracies of real cases (Diamanti et al. 2024: 8), a complex endeavor but absolutely necessary in order to increase the informative potential of the simulation. The exploration of various data capture models is also welcome, for the purposes of comparison and adaptation on a case-by-case basis. The brief theoretical reflection offered at the end of the article dwells in all these points and problematizes the difference between terrestrial and aquatic archaeology. In fact, the distinction does not only exist in the technical component, as although it draws in theoretical elements from archaeology that is carried out on land (see Krieger 2012 for this matter), the problems and interpretations are shaped by different factors and therefore become unique (Diamanti et al 2024: 15). The future, according to the authors, lies in increasing the autonomy of these vehicles so that the human element does not have to make decisions in a systematic way. It is in that note, and in order for that path to become closer to reality, that we strongly recommend this article for publication, in conjunction with the comments of the reviewers. We hope that its integrated approach, which brings together methods, theories and reflections, can become a broader modus operandi within the field of underwater robotics applied to archaeology.
References:
Diamanti, E., Yip, M., Stahl, A. and Ødegård, Ø. (2024). Advancing data quality of marine archaeological documentation using underwater robotics: from simulation environments to real-world scenarios, Zenodo, 8305098, ver. 4 peer-reviewed and recommended by Peer Community in Archaeology. https://doi.org/10.5281/zenodo.8305098
Kapetanović, N., Vasilijević, A., Nađ, Đ., Zubčić, K., and Mišković, N. (2020). Marine Robots Mapping the Present and the Past: Unraveling the Secrets of the Deep. Remote Sensing, 12(23), 3902. MDPI AG. http://dx.doi.org/10.3390/rs12233902
Krieger, W. H. (2012). Theory, Locality, and Methodology in Archaeology: Just Add Water? HOPOS: The Journal of the International Society for the History of Philosophy of Science, 2(2), 243–257. https://doi.org/10.1086/666956